ROSS

The Robotic Oceanographic Surface Sampler
The ROSS project’s goal is to provide extremely unique sets of data from an inexpensive and relatively expendable research platform. This page details both the project as a whole, and highlights my contribution towards it.

A picture of a ROSS unit in the water. Photo credit: San Nguyen
For this project, I am working for Dr. Jonathan Nash of the Ocean Mixing Group at Oregon State University. I have been branded as the “Lead Roboticist” and as such, I am responsible for all of the electronics systems of the kayaks, with a bit of reach into software and mechanical design. I work to design and implement all of the electronics that ROSS requires to function. I work with an ever growing team of about 10-12 engineers/scientists/machinists that work together to get the kayaks in the water. I am directly responsible for hiring and managing about 5 engineering students.

I’m working with a great team of Oceanographers and Engineers on the project! Photo credit: San Nguyen
Why ROSS?
ROSS is an extremely effective scientific platform as it allows scientists in the field to multiply their efficiency by collecting a distinct and unique dataset from what is typically collected on a manned research vessel. It can also allow for tight multi-ship coordination.
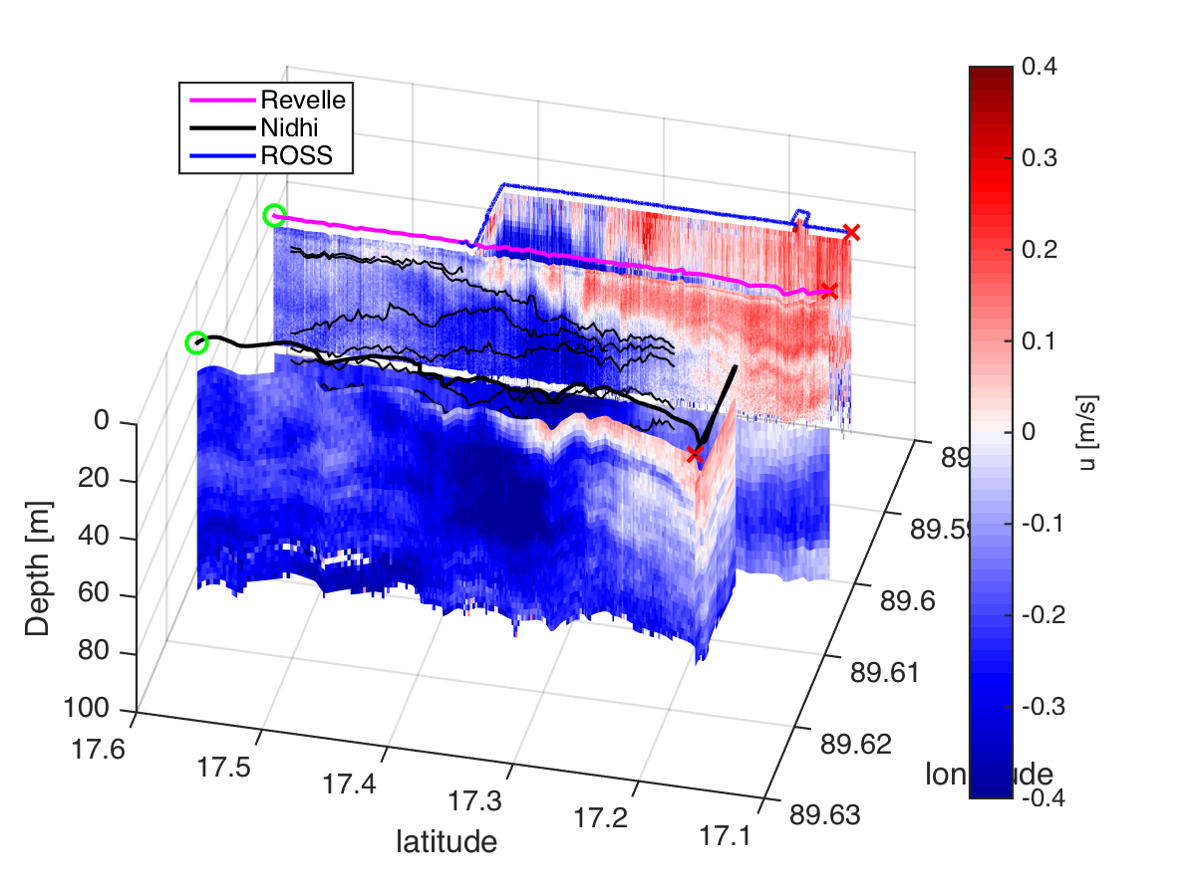
ROSS coordinating with R/V Roger Revelle and ORV Sagar Nidhi during ASIRI 2015.
ROSS is also capable of collecting data that is impossible for a manned vessel to collect. This was tested in particular during the LeConte Glacier deployment of August 2016. Kayaks were sent directly up to the glacier face, where the vessel we launched them from couldn’t get anywhere near due to safety concerns. Giant chunks of ice were constantly calving off of the face, which, while inconvenient (and potentially deadly) for manned craft, doesn’t phase ROSS.

Testing two-kayak operations in Newport, OR. Both of these kayaks were operating in autonomous mode.

ROSS is capable of operating where manned vessels cannot.

Two kayaks head off to the glacier face.
Personal Field Work
I’ve been involved in many testing deployments, and three actual data-collection deployments so far. I have made individual pages for each of these deployments, and they are linked below:
Press
A selection of mentions we have gotten in the media. I am featured in the bolded items.
Videos
This video was a test of one of the first protoypes in Yaquina Bay in Newport, OR off of the R/V Elakha.