ROSS Ebox Design
EBox Design
Most of my work with the ROSS project has, naturally, been with the Electronics box. This page showcases the progression of the electronics box from proof of concept, to what I call our “production” boxes.
Version 1.0
This version was completely used for a proof-of-concept of our system. I assembled this box in an afternoon, and it contains everything that is essential for the kayak to run. We did multiple tests (from the Wilammete River to Yaquina Bay in Newport) using this box and it worked like a charm!

EBox Version 1.0
Version 2.0
This was the next version of the EBox. We used a very nice pelican case with a removable wood platform for all the electronics. This was a lot nicer for me, as I was able to wire the ebox much cleaner (even though it is a total mess, I know. If you’re looking for nice wiring, you better skip to the next one). We were also able to use dedicated bulkhead connections for all of our electrical connections. This also allowed us to claim that our box was at least “water-resistant”. This box worked, and there was another one made very similar to it (see Version 2.1). These have been deployed on Kayaks multiple times, across the world.

Version 3.0
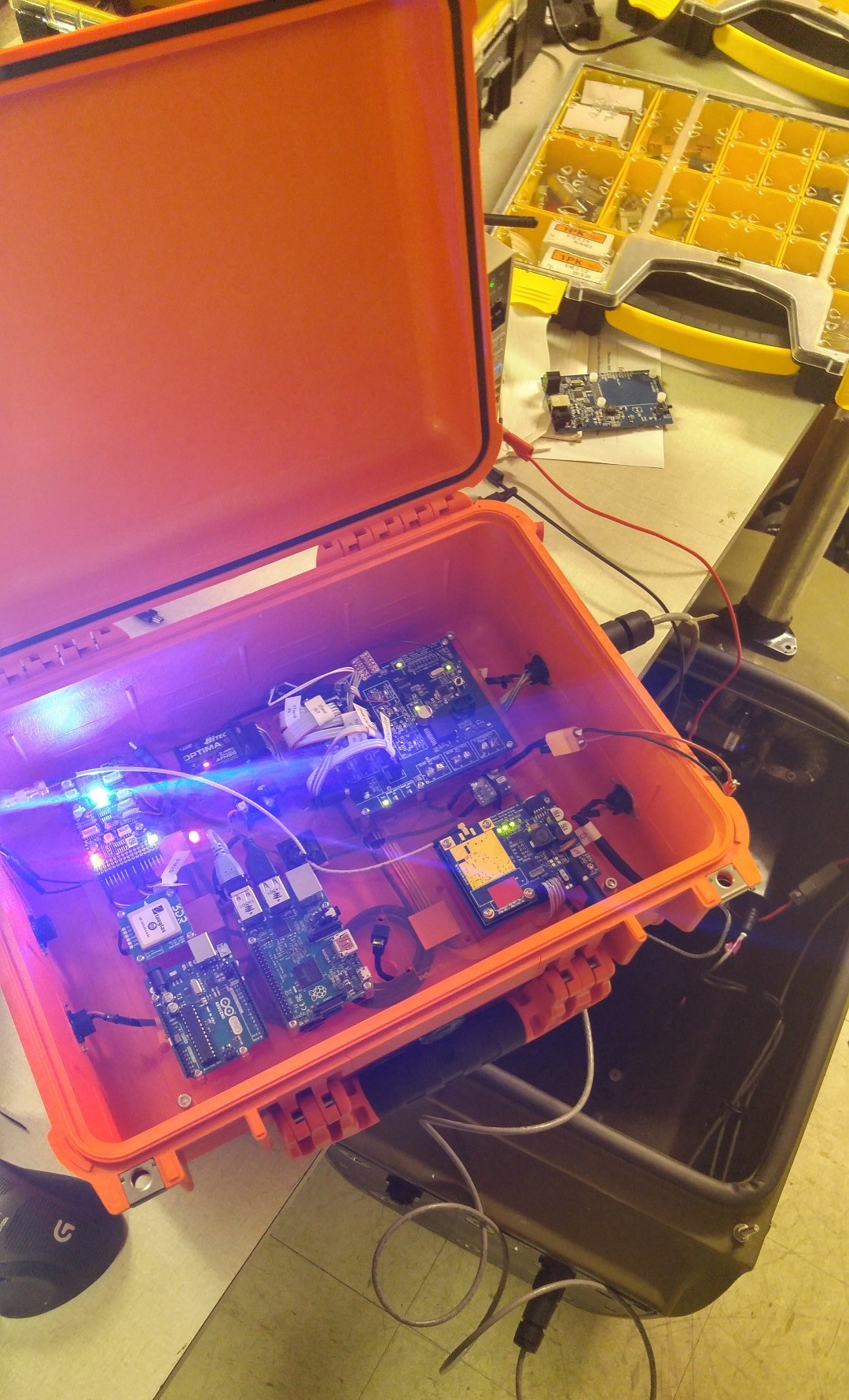
This is the first version of our “production” EBoxes. It was the first time that thought was put into construction and manufacturability. As you can see, other electronics were added as well (including a Raspberry Pi 2). The Acrylic mounting plate was designed by Dylan Thrush (www.dylanthrush.com). You can see both my Power Distribution Board and my XTend Daughterboard in use!

-

- E-Box during testing. This is Ebox version 3.0
Version 3.1
This is the second version of our production EBoxes. A second layer was added to handle all of the electronics required. Otherwise, these boxes are very similar to 3.0, just electronics updates and a couple extra connectors. You can see four of my PCBs in this picture! The ROSS Power Distribution Board, the XTend Daughterboard, the EBox Auxillary Board, and the Multi RS232 Adapter.

Version 4.0
Version 4 of the EBox was mainly designed to upgrade the main processor from a Raspberry Pi to an INTEL NUC due to reliability issues we were having with the Raspberry Pi. They also included numerous other updates, including a full-featured router, reliable battery backup system, and improved winch control systems.

3 production EBox Version 4 units before wire routing, programming, and final testing. Space is limited in our lab, so the floor was used as a queueing area.